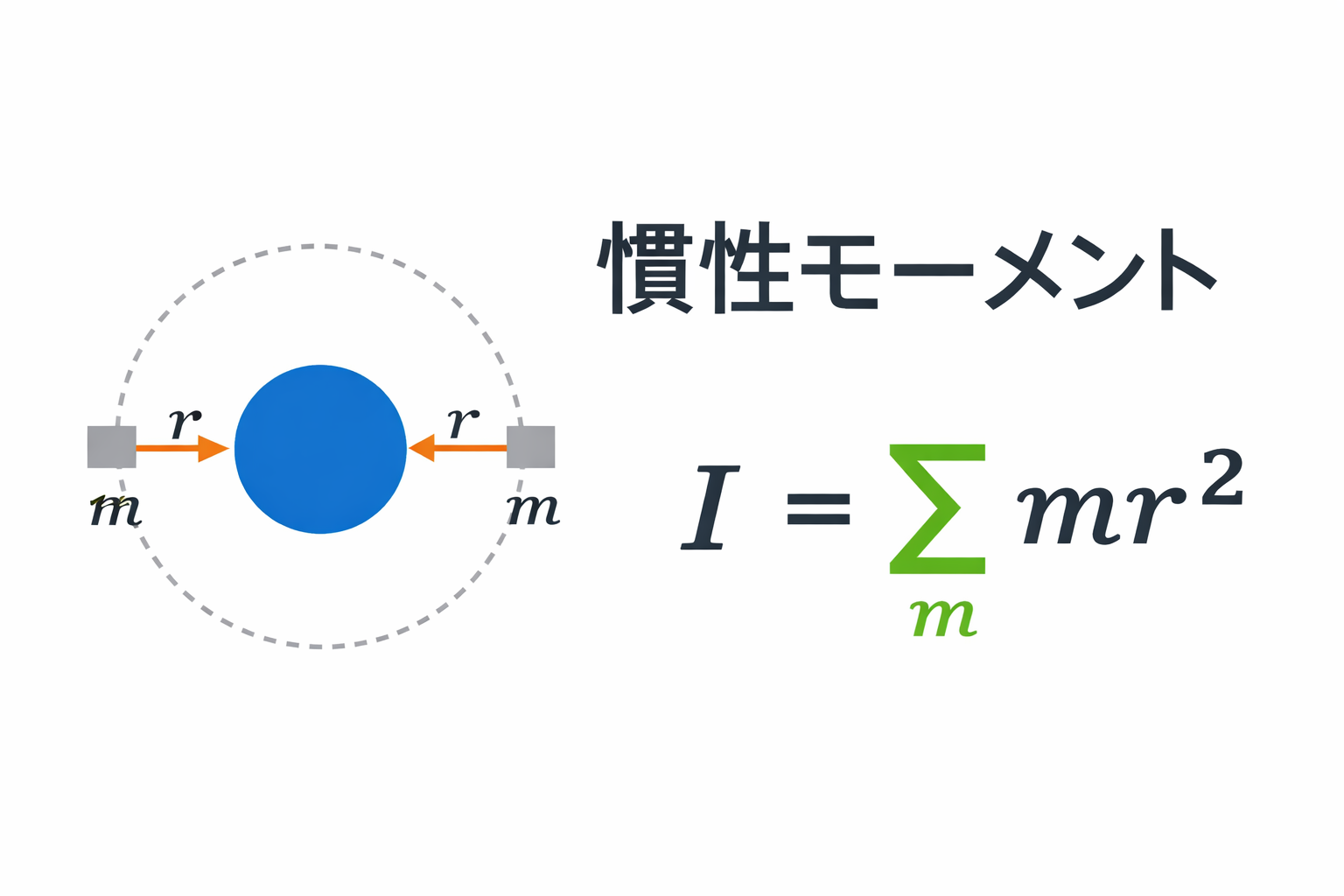
慣性モーメントとは、
物体の「回転しにくさ」を表す量です。
直線運動でいう「質量」に相当し、回転運動では次のように置き換えられます。
- 質量 → 動きにくさ(直線)
- 慣性モーメント → 回りにくさ(回転)
つまり、
👉 重くて外側に質量があるほど回りにくい(慣性モーメントが大きい)
■ 基本式
慣性モーメントは以下で定義されます。
- :慣性モーメント [kg・m²]
- :質量 [kg]
- :回転中心からの距離 [m]
■ 重要ポイント
① 距離の影響が非常に大きい
距離は2乗で効きます。
👉 半径が2倍 → 慣性モーメントは4倍
② 同じ質量でも形状で変わる
例:
- 円盤(中心に集中) → 小さい
- リング(外周に集中) → 大きい
③ 回転軸によって変わる
同じ物体でも、
- 中心軸で回す
- 端で回す
で値は変わります。
■ 代表的な慣性モーメント
● 円柱(回転軸:中心)
● 円柱(回転軸:端)
● 棒(中心回転)
● 棒(端回転)
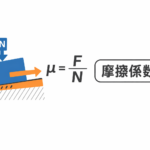
■ 回転運動との関係(超重要)
トルクとの関係は以下です。
- :トルク [Nm]
- :慣性モーメント
- :角加速度
👉 慣性モーメントが大きいほど必要トルクが大きくなる
これはサーボ選定で最重要ポイントです。
■ 実務での使い方(機械設計)
● サーボモータ選定
- 負荷慣性を算出
- モータ慣性との比を確認
👉 慣性比が大きすぎると
- 振動
- 制御不安定
- 応答悪化
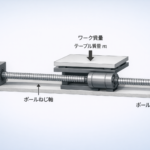
● ボールねじ系
慣性として考慮するもの:
- ワーク重量
- テーブル
- ボールねじ軸
- カップリング
- モータロータ
● 換算慣性(重要)
直線運動 → 回転に変換:
- :リード
■ 計算例
条件:
- 質量:10kg
- 半径:0.1m
■ よくある間違い
× 重さだけで判断する
👉 NG:位置(半径)が超重要
× 回転軸を無視
👉 NG:軸が違うと全く別物
× 単位ミス
👉 mm → m 変換忘れが多い
■ まとめ
- 慣性モーメント=回転のしにくさ
- 距離の2乗で効く(超重要)
- トルク計算に直結
- サーボ選定の核心パラメータ
■ 一言でいうと
👉 「どれだけ回しにくいか」を数値化したもの
■ 計算例
■ 条件
円盤を回転させるケース
- 材質:SS400
- 直径:Φ200 mm
- 厚み:20 mm
- 回転軸:中心軸
- 密度:7,850 kg/m³
■ STEP① 体積の算出
- 半径
- 厚み
■ STEP② 質量の算出
■ STEP③ 慣性モーメント
円盤の式:
■ 結果
👉 慣性モーメント:0.0247 kg・m²
■ 設計でのポイント
● 直径の影響が非常に大きい
例えば直径を2倍(Φ400)にすると
👉 慣性モーメントは約4倍
● サーボ選定への影響
この値はそのまま
- 必要トルク
- 加速性能
- 応答性
に直結します。
■ 応用(トルク計算)
例えば角加速度 の場合
■ 一言まとめ
👉 慣性モーメントは「形状+サイズ」で決まる最重要パラメータ
コメント